刘明玥,涂锐,3,洪菊,苗亚格,李芳馨
(1.中国科学院国家授时中心,西安 710600;
2.中国科学院大学,北京 100049;
3.中国科学院精密导航定位与定时技术重点实验室,西安 710600)
随着全球卫星导航系统(GNSS)的不断发展和完善,GNSS 所提供的定位、导航和授时(PNT)等服务已成为当今社会不可或缺的一部分[1].目前在轨运行的GNSS 主要有美国的GPS、俄罗斯的GLONASS、欧洲的Galileo 和中国的北斗卫星导航系统(BDS).多GNSS 兼容互操作是当前卫星导航的发展态势也是研究热点,而系统间的时差监测分析是实现GNSS 兼容互操作的基础前提[2].系统间时差是由于不同的卫星导航系统都有各自的系统时,但不同导航系统时间的产生机制、时间尺度算法和溯源方式不相同,从而导致不同导航系统的系统时存在着几十纳秒的差异,该差异称为系统间时差[3].
目前国内外学者对GNSS 间时差监测的研究大多针对时差监测方法、时差监测精度评估以及时差应用等方面.陈俊平等[4]分析了目前GNSS 系统间时差监测主要的方法,并进行GPS/GLONASS 系统时差解算,最后将GNSS 的系统时差应用到多模导航定位,详细讨论了GPS/GLONASS 时差以及测站硬件延迟.于碧云[5]研究了Galileo 系统时差监测与数据处理方法,同时验证GPS/Galileo 系统时差在组合导航中的应用.章洁君等[6]比较基于GNSS 空间信号的三种时差监测方法,在距离不同的时间实验室之间进行时差试验,分析不同方法时差监测结果的差异.同时,RICARDO 等[7]分析了对GIOVE-A 和GIOVE-B 两颗实验卫星的组合定位精度以及时间偏差.MOUDRAK等[8]提出系统时差在组合导航定位中的应用的必要性,并对比利用广播星历进行组合导航定位的精度.
时差监测结果对于多系统兼容互操作是必不可少的一个环节[9-10],同时,时差的稳定性在一定程度上影响着多系统融合的应用情况[11].在多系统GNSS时差结果实时预报应用中,时差稳定性是一个十分重要的影响因素[12-13].然而,当前在时差稳定性分析方面的相关研究较少.
此外,北斗三号全球卫星导航系统(BDS-3)于2020年7 月全面建成并开始提供全球服务,GPS 与BDS-3的时差分析对实现GPS 与BDS-3 之间的兼容互操作,为全球用户提供更加优质的服务提供支撑作用.因此,本文将对GPS 与BDS-3 系统时差稳定性进行分析.
由于不同测站数据质量存在差异,导致某些天数据不能正常解算,但整体变化趋势分析不受个别结果的影响,因此论文选用13 个国际GNSS 服务(IGS)中心的测站从年积日第183—220 天其中30 天的数据和产品,分别采用伪距法和相位法获得钟差结果,再通过单站空间信号法得到系统时差监测结果,从设备型号、观测量、时间长度三个方面进行时差的稳定性分析.
要分析GPS 和BDS-3 系统间时差稳定性,首先要得到两系统间的时差结果.本文采用单站空间信号法以获得GPS 和BDS-3 的时差值.
单站空间信号法是指单一测站的多模接收机通过接收卫星导航系统信号,对该信号经一系列处理后得到原始观测数据,然后再解算得到卫星导航系统时间与接收机本地参考时间之间的钟差,利用不同导航系统数据得到的钟差值作差即可得到系统时差[14-15].空间信号法的原理如图1 所示,解算方式如式(1)所示.本文分别解算GPS 和BDS-3 单系统时间与接收机本地参考时间之间的钟差,再将钟差值作差后得到GPS 与BDS-3 两个导航系统之间的时差结果.

图1 单站空间信号法原理图

式中:TGPS为GPS 系统时间;
TBDS-3为BDS-3 时间;
TRef为接收机本地参考时间;
为接收机本地参考时间与BDS-3 时间之间的时差值;
为接收机本地参考时间与GPS 时间之间的时差值[16].
为得到接收机本地参考时间与GNSS 系统时间之间的钟差值,本文分别采用伪距法和相位法进行解算[17].
伪距法以测距码为观测量进行测距.该方法是卫星导航定位中最基本的方法,具有解算速度快、解算结果唯一等优势,但测量精度有限[18].观测方程为
相位法以载波相位为观测量进行测距,载波相位观测量是卫星导航系统接收机接收的卫星载波信号与接收机本振信号的相位差,再乘以波长,可以得到卫星至接收机的粗略距离[6],观测方程为

式中:λ 为载波观测量的波长;
φ表示相位差;
表示整周模糊度.
本文采用IGS 提供的精密产品和观测数据,利用双频无电离层组合观测消除电离层误差,将对流层干分量延迟误差和部分湿分量延迟误差、相对论效应、地球自转误差、天线相位缠绕误差、地球潮汐误差等进行模型改正,卫星端和接收机端的天线相位中心使用IGS 提供的igs14.atx 文件进行改正[19],对流层残差采用随机游走过程估计,并强约束测站坐标,通过标准单点定位求解得到伪距法的时差结果,通过精密单点定位(PPP)求解得到相位法的时差结果[18].同时,采用正反二次解算来减小载波相位模糊度收敛对结果的影响.
2.1 不同测站设备对时差稳定性影响分析
每个GNSS 测站所采用的设备存在差异,为研究该差异是否对系统时差稳定性产生影响,选取13 个IGS 测站年积日从第183—220 天其中30 天的数据进行分析,数据采样间隔为30 s,软件采用自研的GNSS精密时差分析软件.根据设备型号将所选测站分为四组,分别为型号完全相同组、接收机型号不同组、天线型号不同组、时钟型号不同组,测站和设备详细信息如表1 所示.
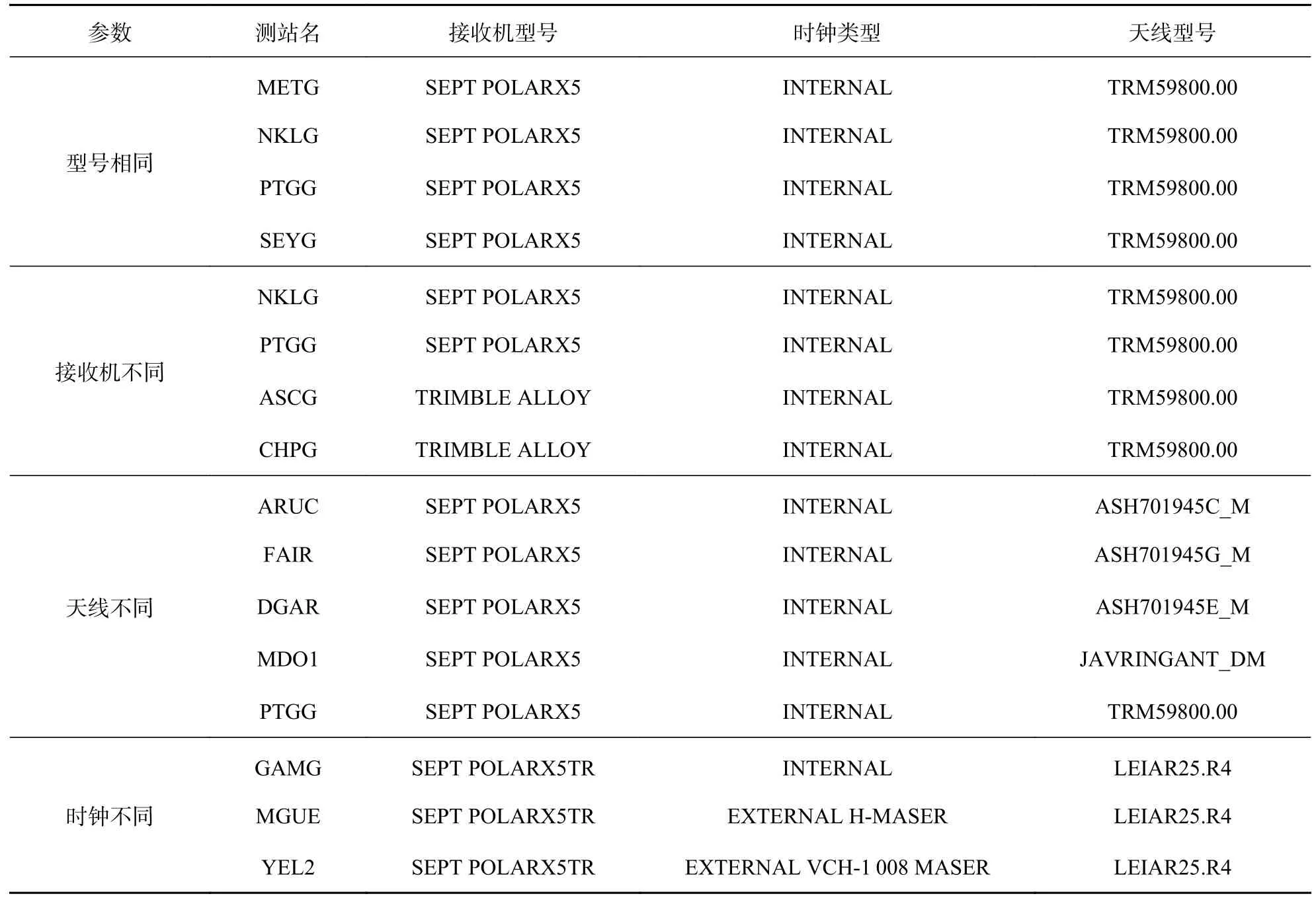
表1 测站信息表
对四组测站分别采用伪距法和相位法两种方式解算GPS/BDS-3 系统间时差,图2~3 分别为各测站第183 天伪距法和相位法解算的时差结果,图4~5分别为各测站30 天伪距法和相位法解算的时差结果.由图可知,不管是伪距法还是相位法,不同的设备型号对时差结果稳定性的影响较小.然而,由图4~5可知,第23 天的时差结果发生一个跳跃性波动,发生该变化的测站采用接收机型号均为SEPT POLARX5型接收机,该现象可能与接收机固件升级有着一定的关系,这对长期时差稳定性的监测带来一定影响.虽然不同型号设备对时差稳定性影响较小,但因不同型号设备时延的差异导致求解的系统间时差值有着较大偏差,由图2(d)、图4(d)可知,伪距法的时差结果相差近40 ns;
由图3(d)、图5(d)可知,相位法的时差结果相差近百纳秒.
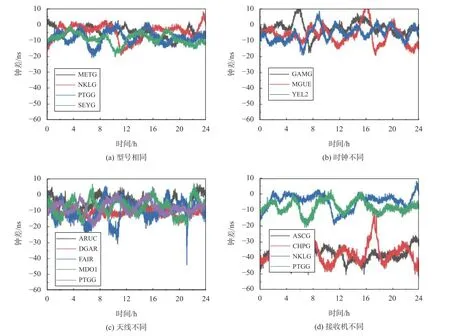
图2 基于伪距法解算的第183 天时差结果

图3 基于相位法解算的第183 天时差结果
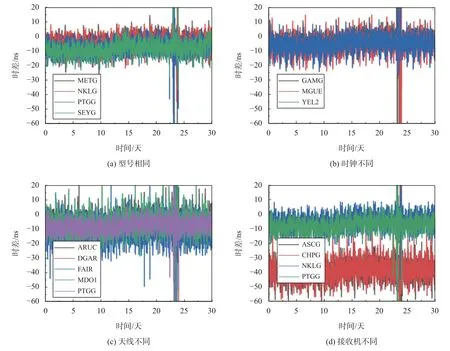
图4 基于伪距法解算的30 天时差结果
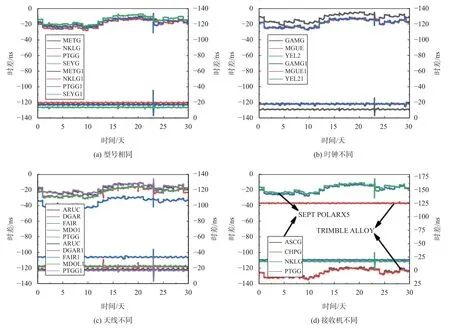
图5 基于相位法解算的30 天时差结果
2.2 不同观测量对时差稳定性影响分析
为研究伪距和相位观测值解算的钟差结果对时差稳定性的影响,对所选测站分别使用伪距法和相位法进行单天和多天两种情况下系统时差稳定性分析,由图2~5 可知,使用载波相位观测量所解算的时差结果稳定性优于使用伪距测量得到的时差结果.单天时差监测结果中,使用伪距观测量解算的时差结果呈现较大噪声的波动,波动幅度可达25 ns,而使用载波相位观测量得到的结果中,时差值在图中近似一条直线,波动较小.多天监测结果有着同样的结论,采用载波相位观测量解算的时差结果在30 天内的稳定性明显优于采用伪距测量得到的时差结果.其原因是在GNSS 信号观测中,伪距测量因码元宽度较大测量精度不高所致,而载波相位观测量精度通常是伪距的100 倍.
为进一步分析不同观测量对时差结果的影响,对第183 天各测站时差结果采用修正阿伦方差计算频率稳定度,并对其进行分析.图6 为伪距法得到的修正阿伦方差结果,图7 为相位法得到的修正阿伦方差结果.由图6~7 可知,伪距法得到的时差结果万秒频率稳定度在10-12~10-13量级,而采用相位法得到的时差结果万秒频率稳定度在10-14量级.

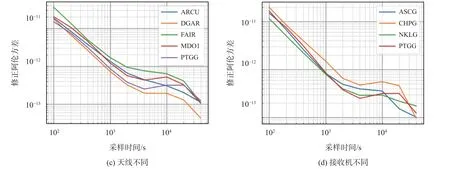
图6 伪距法第183 天修正阿伦方差结果
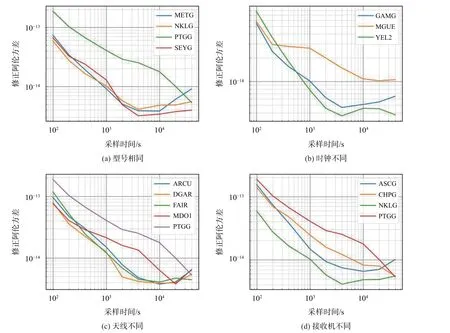
图7 相位法第183 天修正阿伦方差结果
2.3 不同时间长度时差稳定性影响分析
为研究不同时间长度的时差结果的稳定性,将单天结果和30 天结果进行对比分析.从表2~3 的时差标准差可得,采用相位法解算的单天时差标准差为亚纳秒级,30 天时差标准差约在5 ns;
伪距法得到的单天和30 天时差标准差相差不大,约在5~10 ns.结合图5 可知,天与天之间相连的地方存在不同大小的时差值波动.这种波动是由于采用事后单天独立解算策略而非实时连续多天解算使得相邻两天的整周模糊度求解值存在差异导致的,通过对时差结果进行归算处理后,其30 天时差值变化曲线与单天相似,近似一条直线,同时归算后时差标准差与单天时差标准差接近,为亚纳秒级.
图8~9 分别为伪距法和相位法得到的多天时差结果进行相邻两天的时差一阶差分的结果,图10 是归算后相位法相邻两天的时差一阶差分结果,图11~12 分别为伪距法和相位法单天时差结果进行相邻历元一阶差分结果.从图可以得出,伪距法得到的差分结果中,单天与30 天的差分波动范围相近,在±4 ns 内波动.相位法未进行归算处理的差值结果较为离散,但经归算后得到的结果与单天一致,都在零值附近.
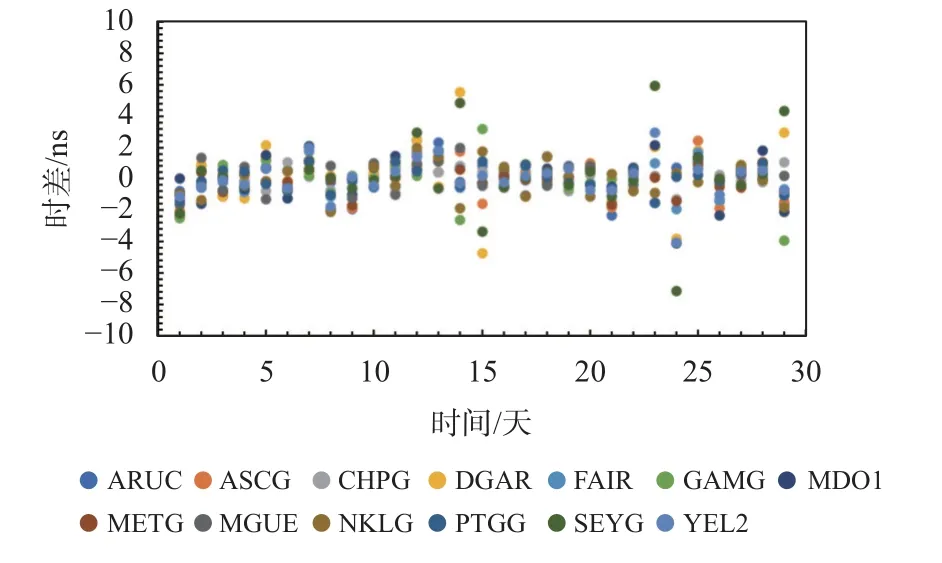
图8 伪距法相邻两天的时差一阶差分结果
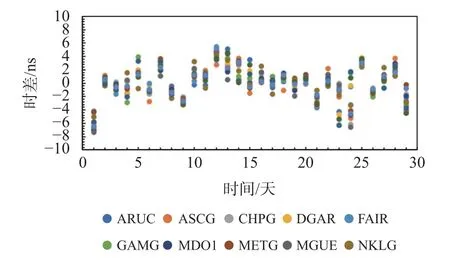
图9 相位法相邻两天的时差一阶差分结果

图10 归算后相位法相邻两天的时差一阶差分结果
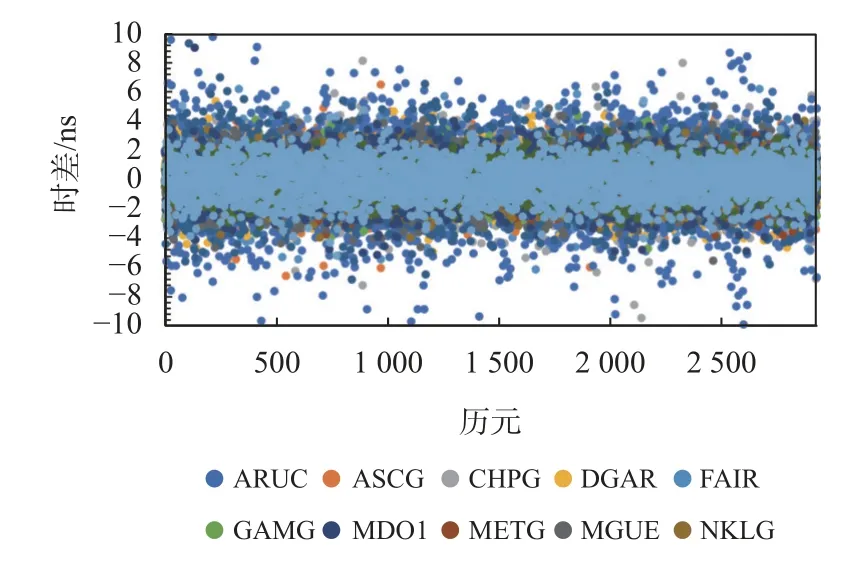
图11 伪距法单天相邻历元时差一阶差分结果

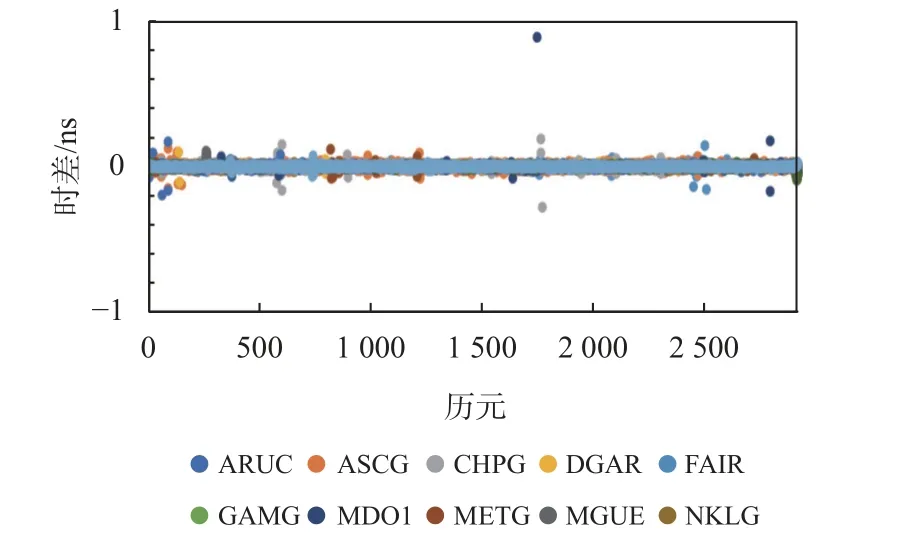
图12 相位法单天相邻历元时差一阶差分结果

表3 各测站30 天时差结果标准差统计
本文使用IGS 提供的多测站多天的数据和产品,分别采用伪距法和相位法两种方法解算钟差结果,再通过单站空间信号法得到GPS/BDS-3 系统间时差.分别从不同设备型号、不同观测量、不同时间长度三个方面对时差稳定性进行了分析,得到如下结论:
1)不同测站在接收机、天线、钟三种设备有所差异的情况下GPS/BDS-3 时差稳定性相当,即不同设备型号对其稳定性影响较小.但不同设备型号时延的差异会造成时差值的不同.
2)通过比较伪距法和相位法对时差稳定性的影响,结果表明,采用载波相位观测量解算的时差结果稳定性优于伪距测量方法,伪距法得到的时差结果万秒频率稳定度在10-12~10-13,相位法得到的时差结果万秒频率稳定度约在10-14.
3)对比单天与30 天时差解算结果,结果表明,除相位法因数据处理策略导致的天与天之间的跳跃外,不同时间长度监测的时差稳定性基本相同,伪距法约为5~10 ns,相位法为亚纳秒级.
本文研究的GPS 和BDS-3 系统间时差的稳定性,不仅为GNSS 时间兼容互操作提供了技术支撑,同时为下一步的时差建模预报以及应用奠定了基础.
致谢:本文的研究得到了国家自然科学基金项目(41674034,41974032)的支持.
猜你喜欢 测站差值接收机 低成本GNSS接收机监测应用精度分析导航定位学报(2022年5期)2022-10-13基于频率引导的ESM/ELINT接收机的设计与实现中国电气工程学报(2019年18期)2019-10-21关注高中时代(2017年7期)2018-02-24清丰县新旧气象观测站气温资料对比分析南方农业·下旬(2017年8期)2017-10-23VB6.0程序在全站仪图根导线测量中的应用城市建设理论研究(2014年25期)2014-09-24阳泉站站址迁移对观测资料的影响分析科技与创新(2014年8期)2014-07-17DVB—S免费机刷机之五卫星电视与宽带多媒体(2013年1期)2013-04-26CDMA系统中2-D RAKE接收机的性能研究现代电子技术(2009年19期)2010-05-13