杨新宇,雷廷万,钟 昆,张 翰,刘 宽
(航空工业成都飞机设计研究所,成都 610031)
近年来世界各国反介入/区域拒止能力不断发展。在国土防空领域,防空作战体系通过构建全域杀伤网络,正在逐步完善全域感知、全域指控、全域打击的能力。单一的作战飞机平台在遂行低空低速的侦察或对地打击任务时,面临着敌方防空作战体系的探测、干扰和攻击,其单独作战不具备足够的安全性,或者在具备安全性的前提下不具备对目标侦察、毁伤的有效性。因此,在今后的一段时间内,多机间的协同作战将会是主流趋势。
多机间的协同,其核心主旨是借助不同分工的飞机,形成分布、广域、弹性的作战能力,以期对主战装备起到作战能力扩展、作战资源补充、作战任务分担的作用。多机间的协同,本质上是多机在同一时间,某一任务区域为达成同一作战意图的作战行动。在多机协同中,从地面起飞的僚机受制于飞行速度、空域协同、数据融合等问题,很难快速准确伴随长机完成协同任务。
载机平台和无人子机实施协同侦察探测的作战方式,充分发掘和利用无人子机隐蔽性强、可探测性低的特点,在前期载机平台对目标实施侦察或根据地面情报预先进行任务规划的基础上,通过无人子机抵近侦察,实现对目标的精细化成像。侦察信息则通过数据链回传至载机平台地面站,供情报人员判读。因此,从载机平台投放的空投型无人子机可以很好地解决多机间协同的问题。
本文将分别结合美军在直升机、有人机、无人机平台上进行的多次发射无人子机的试验,对美军无人子机的发展进行介绍,并总结其特点。
1.1 直升机平台空射无人子机
在“多域作战”思想和纵深攻击概念的牵引下,美国陆军开展了“未来攻击侦察机” FARA项目。FARA项目采用“模块化开放式系统架构”,以网络为中心思路,通过攻击直升机和无人机混合编队实现远程精确攻击。无人子机的定位采用模块化任务负载,执行侦察、欺骗、干扰、网络中继等任务。
在项目实施上,攻击直升机并不进入敌方防空火力范围,而是由直升机空中发射的“空中发射效应单元”(ALE)执行任务。ALE进入敌防空圈执行侦察任务,获取相关战场信息,然后由敌防空圈外的直升机发射远程制导弹药摧毁目标。
2020年3月,美国陆军在UH-60“黑鹰”直升机上进行了前射艾利尔埃(Area-I)公司“发射管整合空射无人系统”(ALTIUS)的演示。2020年5月,美国陆军再次基于“黑鹰”直升机空射ALTIUS无人机,进一步演示了空中发射无人机概念。
在试验中,ALTIUS-600从UH-60“黑鹰”直升机短翼下的发射筒中弹出,机翼展开,后螺旋桨启动,然后ALTIUS-600在到达任务区后,在“黑鹰”直升机的控制和指挥下飞行,并通过数据链将侦察图像实时回传。
1.2 有人机平台投放无人子机
2013年,美国军方为P-8A具备对抗潜艇的高战斗力创造了条件。为了解决P-8A磁异常探测器(MAD)不能在高空使用,导致潜艇定位不足的问题,美国海军研究办公室批准BAE公司开发一种“无人瞄准航空系统”(UTAS)微型无人机,可直接从P-8A发射。UTAS微型无人机如图3所示。UAV可以装备MAD寻找潜艇,UTAS可以自动将目标数据返回到P-8A。
配备UTAS的P-8A可以直接投放高空鱼雷,在GPS系统的引导下攻击敌方水面舰艇或潜艇,而无需接近敌方防空武器的射程然后开火,这大大提高了机组人员的生存和突袭能力。
2015年9月,美国DARPA启动了小精灵项目的研究。项目计划通过C-130运输机和B-52/B-1轰炸机等大型飞机平台投放无人机群。在敌方防御区边缘远程识别目标后,编队协同进入防御边界,在短距离内对某些目标执行敌情探测、电子攻击和空间定位等作战任务。任务完成后,离开敌方防御区,用C-130运输机回收机群。
“小精灵”项目的关键技术包括:空中发射回收技术;
协作技术;
低成本耐磨无人机机身设计和发射平台的低成本改装技术。
2016年10月,美国国防部长战略办公室计划并实施了无人机“蜂群”战术演习的空中发射。2017年1月,3架F/A-18F“超级大黄蜂”战斗机在Ma0.6下,连续投放103架“灰山鹑”无人机。无人机“蜂群”在地面站指挥下,通过机间通信与合作,成功完成了集体决策、自主修正和自适应编队飞行。
1.3 无人机平台投放无人子机
2020年9月,美国通用原子公司在MQ-9“死神”无人机上开展了“雀鹰”小型无人机挂载试验。该无人机挂载于MQ-9无人机机翼通用挂架下,投放分离后旋转90度展开。
“雀鹰”无人机可扩展MQ-9无人机的传感器探测范围,也可用于实施电子战、迷惑和干扰敌方防空,还可发展为巡航导弹,完成硬摧毁任务。
2021年3月,美国空军的XQ-58A“女武神”隐形无人机首次从其内埋武器舱发射了ALTIUS-600小型无人机系统。ALTIUS-600可以配合XQ-58A遂行摄像、情报收集甚至执行杀伤任务。
2021年5月,通用原子航空系统公司表示其正在开发一种新型“空射效应”无人机。无人机有V形尾翼,由螺旋桨推进。其可协助MQ-9或MQ-1C无人机渗透、瓦解和对抗反介入/区域拒止防空力量,使大型飞机远离战术地空导弹的攻击区域,并提高大型飞机的生存能力。
1.4 美国空投型无人子机使命能力和关键技术
本文对美国基于直升机、有人机、无人机平台空投无人子机进行相关分析,总结出其网络化、低成本、可损耗、多功能的特点。在作战使命上,无人子机平台既要保证主战平台有效生存,又要实现对敌侦察压制。
为满足这一系列作战使命,无人子机需要具备三大方面的能力。一是快速编队协同能力,无人子机从载机平台投放分离之后,子机和载机平台之间需要快速编队组网,具备较高的时效性。对于无人机的机群,需要具备较强的组网能力。二是适用于强对抗、强拒止的作战环境,无人子机需要代替载机前出,进入危险区域执行侦察任务,然后将侦察数据回传,由载机平台对目标进行打击。三是要求无人子机有较强的自主性,其需要具备在不受人的干预、非预知环境下自动实现给定任务的能力。
无人子机涉及的关键技术主要有:空中发射与回收技术;
载机与子机、子机与子机间协同技术;
集群无人子机自动发射策略;
小型分布式有效载荷集成;
集群自主协同技术等。
无人机平台在执行侦察打击任务时,由于存在实战条件限制、地形和天气等各种因素所导致的不利情况,暴露出载机缺乏对小目标抵近侦察、判断目标细节的能力,造成贻误战机或不必要的附加伤害。而无人子机从载机平台投放后,可按需对目标进行抵近侦察,并通过数据链将侦察信息回传载机平台和地面站。无人子机典型应用场景如图1所示。

图1 空投型无人子机典型应用场景
为了进一步提高在特定作战环境下的近距侦察能力,结合目前国内无人机的实际应用场景,无人子机应主要协助载机提升三项能力。
1)提升对隐蔽目标的侦察能力,对于地形、建筑等特殊环境,要求通过无人子机低空悬停、绕飞等方式,多视角协同载机侦察。
2)提升对人员类目标细节特征获取能力,通过无人子机实现近距侦照,获取人员类目标细节特征,为载机进一步打击提供准确决策依据。
3)提升环境适应能力,利用投放无人子机的方式弥补载机在有云气象条件下任务执行效果下降的不足。
根据国内近距侦察的任务需求,本文创新性提出一种不同于美军固定翼无人子机的共轴双旋翼无人子机设计思路。与美军固定翼无人子机相比,这种设计主要针对近距侦察的作战场景,共轴双旋翼无人机能够实现空中高效高稳地悬停,进而对目标进行侦察。
4.1 载机平台系统组成
载机平台主要由三大系统组成,分别是无人机系统、地面控制站系统和地面保障系统。无人机系统主要包括机体、飞控系统、发动机系统、机电系统、飞机接口及线束、机载链路终端和任务系统。地面控制站系统主要包括指挥控制系统、地面链路终端和情报处理系统。地面保障系统主要包括信息资源保障系统和保障资源。
在载机平台上挂装空投型无人子机,主要涉及到任务系统中任务管理系统和外挂与武器系统的更改。对于任务管理系统,需要加装子母机通讯终端和子母机通讯天线。对于外挂与武器系统,需要新研无人子机挂架。载机平台系统组成如图2所示。
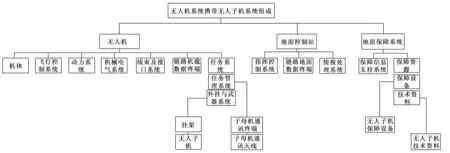
图2 载机平台系统组成
4.2 无人子机系统组成
无人子机系统由用于进行减速及姿态调整的分离减速装置,为无人子机提供保温功能的保护筒和无人子机组成。无人子机系统组成如图3所示。
减速分离装置包含减速伞舱、减速伞系统。减速伞舱用于安装、固定减速伞。减速伞系统由一级伞、二级伞和连接分离机构构成,其中连接分离机构包括伞舱盖与伞舱连接分离机构、保护筒与伞舱连接分离机构和无人子机与伞舱连接分离机构。
共轴双旋翼无人子机由旋翼系统、飞控系统、动力系统、机身结构、电气系统、任务载荷及数据链终端等部分组成。共轴双旋翼无人子机组成如图4所示。
4.3 载机平台任务系统流程设计
载机平台携带无人子机巡航至目标区域上空,在一定距离外,载机平台使用EO等光电侦察设备对目标区域实施侦察,判定目标位置,投放、指引无人子机抵近目标;
无人子机接近目标后,选择有利视角,对目标进行近距精细化成像,无人子机侦察信息通过子机数据链回传至载机平台,然后载机平台将数据传至载机平台地面站,供情报人员判读,为进一步打击提供更为详实的决策依据。
无人子机执行任务过程中主要分为挂机阶段、下降展开、任务阶段、回收/自毁阶段。
4.3.1 挂机阶段
无人子机通过挂架悬挂于载机平台。
4.3.2 下降展开阶段
无人子机投放后开伞降落到预定位置,稳定姿态后展开旋翼,脱伞后开始可控动力飞行。
4.3.3 任务阶段
无人子机动力工作且进入可控状态后,无人子机根据指令或任务规划执行任务。
4.3.4 回收阶段
无人子机根据指令或条件自动判断从任务阶段进入回收飞行。
4.3.5 自毁阶段
无人子机根据指令或条件自动判断进入自毁阶段。
无人子机各阶段任务流程如图5所示。

图3 无人子机系统

图4 共轴双旋翼无人子机组成
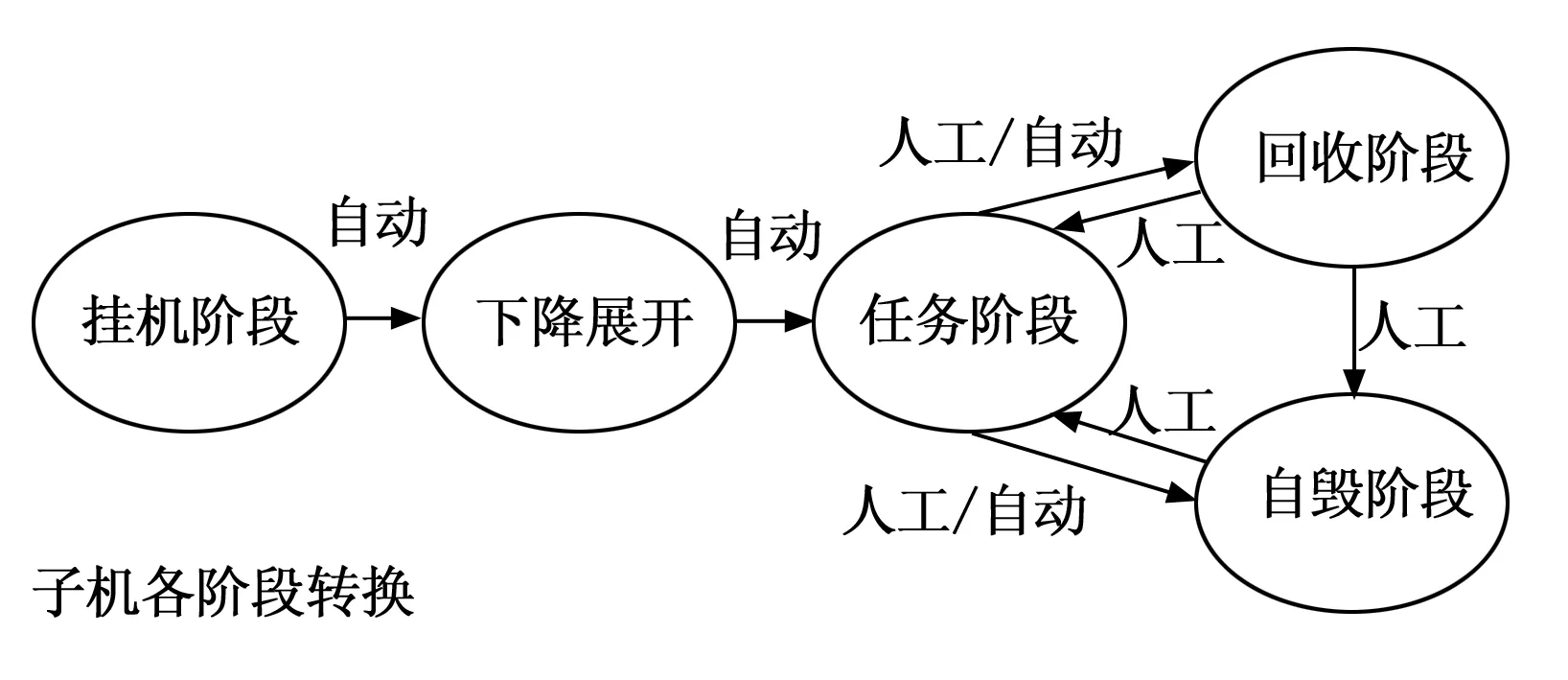
图5 无人子机任务流程
无人子机从载机平台投放后,无人子机进入下降展开阶段,经过自动开伞、脱伞和旋翼展开,无人子机与载机平台通过数据链建立无线通信,上传当前工作状态和参数。地面站接收子机信号并控制飞行,无人子机进入动力飞行阶段,后续自动进入任务阶段。
无人子机的飞行模式主要包含:目标跟飞、目标绕飞、航路点导航飞行、悬停飞行和手动控制飞行。无人子机飞行模式切换如图6所示。

图6 子机飞行模式切换
目标跟飞是无人子机根据载机平台共享的目标信息或子机本身侦察的目标信息,与目标保持一定的距离并跟踪飞行。目标绕飞是无人子机根据载机平台共享的目标信息或子机本身侦察的目标信息,与目标保持一定的距离并绕行飞行。航路点导航飞行时无人子机根据预先加载给任务机的规划,按照航路点进行飞行,子机到点后返回到点状态,载机任务机再向子机发送下一航点位置信息。悬停飞行是指无人子机在当前位置保持悬停飞行。手动控制飞行是指无人子机根据地面人员操控指令进行飞行。
当无人子机进入任务阶段后,地面站对子机携带的EO进行控制,首先载机任务机将接收到的地面站控制指令和参数发送给数传端机,端机再通过无线信号发送给无人子机。子机载荷根据指令进行响应,并将响应后的状态和EO视频信息回传给地面站。
若无人子机需要回收,载机将回收点坐标转发给无人子机,无人子机确认回收点状态信息并将其回传给地面站,无人子机进入回收阶段并朝目标点飞行;
若无人子机不需要回收,则载机不向无人子机转发回收点坐标。若无人子机剩余电量只满足飞往当前回收点时,无人子机自动进入回收阶段。当地面人员发出子机进入自毁指令时,无人子机进入人工自毁阶段。若无人子机剩余电量减小到一定门限,子机自动进入自毁阶段,地面人员也可以发出指令,中止子机的自毁。
4.4 无人子机投放分离过程设计
无人子机投放后需要经历3次分离过程。第一次分离过程中,伞舱盖分离,一级减速伞打开,对无人子机进行减速及调速姿态。一级减速伞展开后,牵引二级减速伞打开,进一步对子机进行减速。子机判断满足二级伞开伞条件后,发出指令点爆连接分离机构,保护筒和无人子机分离,子机空中起桨。最后,无人子机与二级减速伞分离,子机进入自主飞行阶段。无人子机投放分离过程如图7所示。

图7 无人子机投放分离过程
4.5 载机平台与无人子机关键技术
4.5.1 载机平台与无人子机的协同
基于数据链实现载机平台和子机间的自动协同。在本设计中,根据无人子机实时位置和无人子机数据链的作用限制,任务系统实时计算出所需的任务航向,并将航线信息转为控制参数发送给载机平台,完成对载机平台的自动导引飞行。在后续设计中,除了考虑单个载机平台和单个无人子机的协同,还需要考虑载机平台与载机平台之间、载机平台和多个子机之间的协同,即完成从独立平台间的协同组网到分布式平台间的协同组网。
4.5.2 无人子机多阶段的机构分离技术
无人子机前后需要经过3次分离过程,两次降落伞展开并脱伞的过程,以及无人子机空中起控的过程,相比于美国从载机平台上空射无人子机的设计,本设计对于无人子机的分离控制提出了较高的要求。但本设计带来的优点也是显而易见的,采用载机平台重力投放、降落伞伞降的减速方式,发射后,与牢固安装的机翼相比,无人机受载机平台产生的废气和载机相对运动速度的影响较小。
4.5.3 高效高稳悬停无人侦察子机技术
对于遂行高精度侦察的无人子机平台,要求无人子机任务载荷能够快速稳定地跟踪目标,其悬停稳定性是完成任务的关键技术,这里无人子机采用了共轴双旋翼技术,以满足悬停稳定性的要求。影响载荷侦察精度的因素主要有两个,一是无人子机位置漂移,二是系统的姿态控制。为了保证无人子机平台的位置、姿态稳定性,需要严格控制其俯仰、方位角速率误差,将俯仰、方位姿态稳定控制限幅速率限定在一个合适的范围,以保证任务载荷快速稳定跟踪目标。
4.5.4 目标定位及识别技术
目标观测需要实现对目标区域的高精度定位识别。当无人子机处于识别模式时,要实时跟踪目标,仅依靠载荷本身的跟踪能力难度较大,还需要依赖载机本身的移动特性。同时,需采用关键点检测技术、图像预处理技术、图像特征提取技术、图像对比识别技术、ERR识别效果评测、3D模型生成技术等技术手段,加强无人子机目标识别的能力。
4.5.5 无人子机隐蔽安全性设计技术
无人子机隐蔽技术包括光电隐蔽、降噪控制、反电磁探测等技术。对于共轴双旋翼无人子机,要实现近距隐蔽侦察的目标,其降噪控制十分关键。降噪控制可以从两个方面进行考虑:1)通过技术改进将共轴双旋翼无人子机本身的噪声降低;
2)提高子机平台传感器的探测能力,使无人子机能够在更远的距离上探测目标,从而使无人子机更不容易被敌方发现。在现有技术状态下,要解决因噪声带来的共轴双旋翼无人子机隐蔽问题,需要综合评估子机传感器能力和噪声程度,得出一个最小隐蔽探测距离,无人子机应该在此距离外探测目标。
4.5.6 无线数传技术
为了实现无人子机系统与地面平台之间的数据交换,必须选择无线电数据传输模块作为它们之间的数据传输桥梁,完成无人机飞行控制系统设置的传输以及遥控和地面平台控制命令的上传。鉴于机体的载荷限制和尺寸要求,选择NRF24L01作为数据传输模块。工作频段为2.4 GHz,数据传输范围可达100~200 m,数据传输速率为1 MB/s,完全满足本阶段设计要求。微控制器通过串行USART端口读取数据传输模块的信息,另一端连接到地面平台,无人机位置信息通过数据传输模块传输到地面控制中心。
随着先进武器装备的发展和作战环境的变化,对无人子机系统提出了新的要求。当下对无人子机的需求极其迫切,不管是城市治安或是可能遇到的局部低烈度战争,乃至大国间的体系化战争,无人子机都能开拓新的作战场景,提供新的解决思路。目前,我国仍处于无人子机应用的初期探索阶段,本文在总结分析美国无人子机应用场景的基础上,提出了一种基于无人机平台空投侦察型无人子机的应用场景,并就无人子机挂装于载机平台,对载机任务系统上进行了相关设计。在空投型无人子机的后续发展中,从无人子机的角度需要考虑任务载荷的有效性、匹配性等问题,从载机平台的角度需要关注无人子机集群场景下的协同、回收等问题。就无人子机而言,其发展不应当局限于自身的各项性能要求,而是应该从整体出发,由载机平台推动,由需求引领,推动无人子机的探索和发展。
猜你喜欢 无人协同目标 家校社协同育人 共赢美好未来新班主任(2022年4期)2022-04-27融合创新 协同发展江苏科技报·E教中国(2022年3期)2022-04-19白沙门诗潮(2019年8期)2019-08-23反击无人机小哥白尼·趣味科学画报(2019年12期)2019-02-28京津冀协同发展民生周刊(2017年19期)2017-10-25竹里馆发明与创新·中学生(2017年4期)2017-03-31无人岛上的试验科学大众(中学)(2016年8期)2016-05-14协同软件市场的演进和落地软件工程(2009年12期)2009-01-05新目标七年级(下)Unit 3练习(一)中学英语之友·上(2008年2期)2008-04-01新目标七年级(下)Unit 4练习(一)中学英语之友·上(2008年2期)2008-04-01